Senior Design Week 7 - Pedro C.
- Senior Design
- Jun 23, 2025
- 1 min read

HuskyLens Data Stream
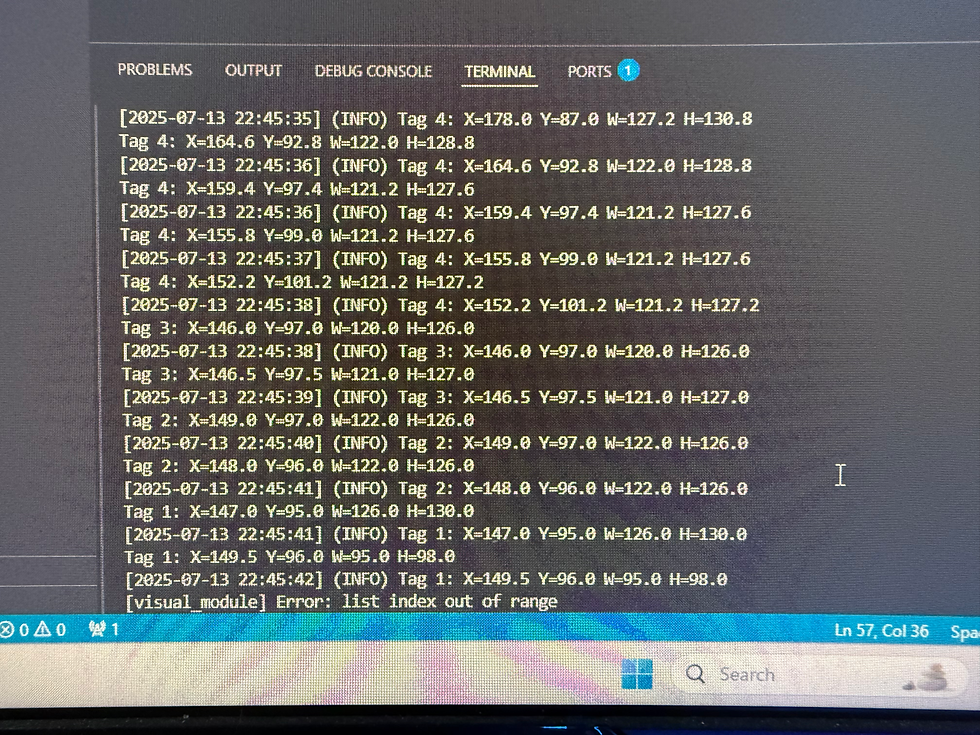
This week I created a Python file that pulls data from the HuskyLens and prints it straight to the terminal. Now, anytime the rover needs visual input, we can see exactly what the camera is detecting in real time, coordinates, tag ID, width, height, all of it.
This will be super useful for both debugging and development. Instead of guessing what the HuskyLens sees, we get a live feed of tag data that we can plug into our alignment and navigation logic.
With this in place, we’re a step closer to having full visual feedback driving the rover’s decisions.
Comments