Senior Design Week 6 - Pedro C.
- Senior Design
- Jun 18, 2025
- 1 min read

Sensor Integration and AI Camera Setup

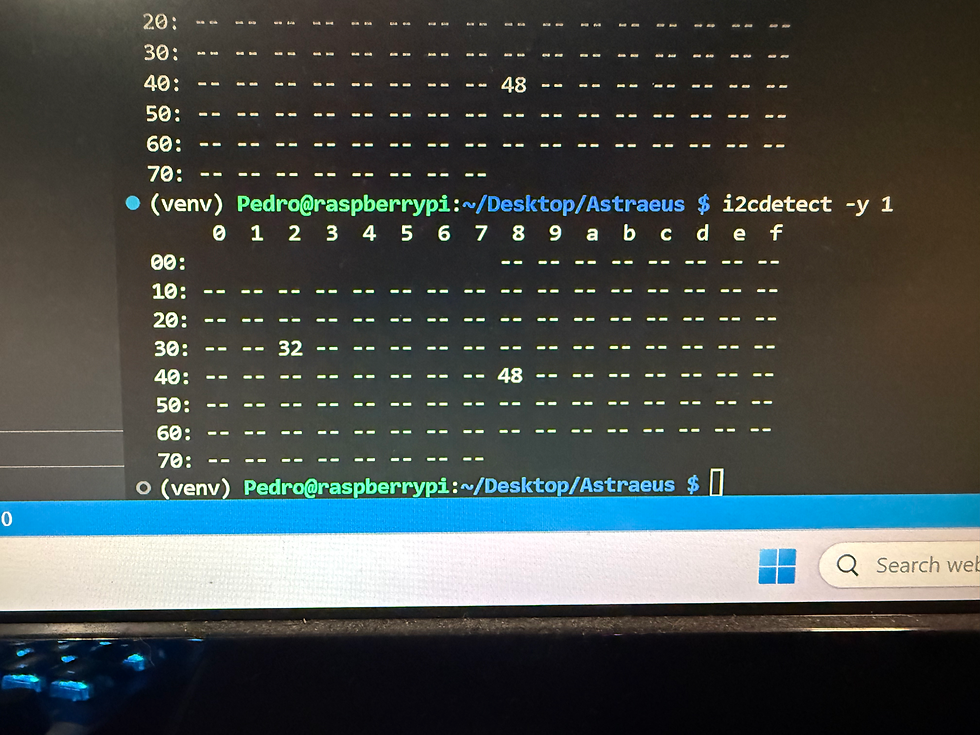
This week was all about getting more eyes on the rover. I successfully got the Sharp distance sensors working with the Raspberry Pi over the I2C bus. After smoothing out the readings, we now get reliable distance data from both sensors, which will be really helpful for obstacle detection and alignment.
I also got communication going with the HuskyLens AI camera. It’s running in I2C mode too, and we’re now able to read tag data directly from it. With this, we can start using visual input for tasks like panel detection and alignment, adding a whole new level of autonomy to the rover.
Having both the Sharp sensors and the HuskyLens working together lays the foundation for smarter movement and decision-making down the line.
Comments